Autonomous Roving
November 15, 2013 One lesson a child learns early in life is that he can't always get what he wants. There are limits to his parents' patience and wallet. When a person starts to make decisions for himself, he's then faced with the "no free lunch" principle, which is more formally known to economists as opportunity cost. No matter what it's called, it's the idea that you can't get something for nothing, and it limits the number of logical economic transactions. In physics, there are similar "no free lunch" limits. There's conservation of mass, by which we can't expect to find more mass in a system, or its energy equivalent, no matter what experiment we perform. Another important physical limit is the speed of light, which has many technological consequences. | Antoine Lavoisier (1743-1794) Extensive experiments by Lavoisier in 1774 showed that the mass of the products of a chemical reaction was always the same as that of the reactants. Lavoisier is typically credited with the law of mass conversation, although there was prior evidence for this.[1] (Detail from an 1801 engraving, via Wikimedia Commons.) |
{kind=link}
"We currently have a micromanaging approach to space exploration... While this suffices for our rovers on Mars, it works less and less well the further you get from the Earth. If you want to get ambitious and go to Europa and asteroids and comets, you need more and more autonomy to even make that feasible."[6]The TextureCam system has a stereo camera for 3D image acquisition, and it also has the ability to identify interesting rocks for further study. By prioritizing what's scientifically important, only the interesting rocks need to have their photographs sent back to Earth. The TextureCam is being trained using the neural network approach of showing it Martian images of scientifically important rocks taken by rover missions. The authors assert that the image classifier could be implemented in a field programmable gate array (FPGA) for maximal efficiency.[5] The TextureCam was successfully tested in the rocky landscape of the Mojave Desert, which acted as an analog for the Martian surface.[6]
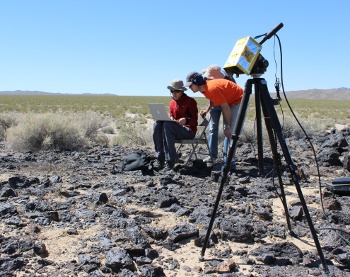 | JPL TextureCam test in the Mojave Desert. Aside from some sparse vegetation, the desert terrain is similar to what exists on Mars. (JPL photo by Kiri Wagstaff.) |
{kind=link}
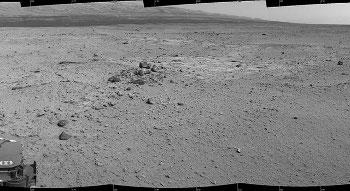 | This is a mosaic of Curiosity navigational camera images on Sol (Martian day) 376, after the rover completed an autonomous navigation over unknown terrain. (NASA/JPL-Caltech image) |
{kind=link}
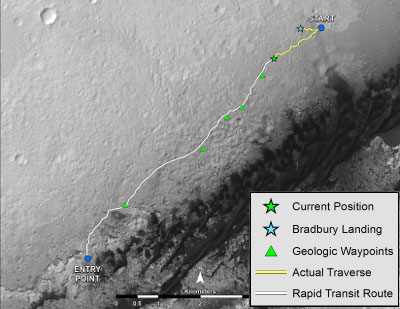 | Intended, and actual path of the Curiosity rover to its entry point at the Mount Sharp area. Curiosity landed at what's now called Bradbury Landing on August 6, 2012. (NASA/JPL-Caltech/Univ. of Arizona image.) |
{kind=link}
References:
- Robert D. Whitaker, "An Historical Note on the Conservation of Mass," Journal of Chemical Education, vol. 52, no. 10 (October, 1975), pp. 658-659.
- Mars Geocentric Distance, Emory University Physics Web Site.
- Carnegie Mellon Creates Practical Self-Driving Car Using Automotive-Grade Radars and Other Sensors, Carnegie Mellon University Press Release, September 4, 2013.
- Evan Ackerman, "CMU's Autonomous Car Doesn't Look like a Robot," IEEE Spectrum, September 9, 2013.
- K. L. Wagstaff, D. R. Thompson, W. Abbey, A. Allwood, D. L. Bekker, N. A. Cabrol, T. Fuchs, K. Ortega, "Smart, texture-sensitive instrument classification for in situ rock and layer analysis," Geophysical Research Letters, DOI: 10.1002/grl.50817, August 27, 2013.
- Upgrade to Mars rovers could aid discovery on more distant worlds, American Geophysical Union Press Release, no. 13-43, September 9, 2013.
- NASA'S Mars Curiosity Debuts Autonomous Navigation, JPL Press Release, August 27, 2013.
- Evan Ackerman, "NASA Lets Curiosity Rover Loose on Mars in Autonomous Driving Mode," IEEE Spectrum, August 29, 2013.
- Mars to Manawatu for robotic rover project, AgResearch News, October 31, 2013.
- Mars Geocentric Distance, Emory University Physics Web Site.